

Deformable object manipulation (DOM) is a long-standing challenge in robotics and has attracted significant interest recently.
This work presents DaXBench, a differentiable simulation framework for DOM. While existing work often focuses on a specific type of deformable objects, DaXBench supports fluid, rope, cloth . . . ; it provides a general-purpose benchmark to evaluate widely different DOM methods, including planning, imitation learning, and reinforcement learning. DaXBench combines recent advances in deformable object simulation with JAX, a high-performance computational framework. All DOM tasks in DaXBench are wrapped with the OpenAI Gym API for easy integration with DOM algorithms.
We hope that DaXBench provides to the research community a comprehensive, standardized benchmark and a valuable tool to support the development and evaluation of new DOM methods. The code and video are available online.
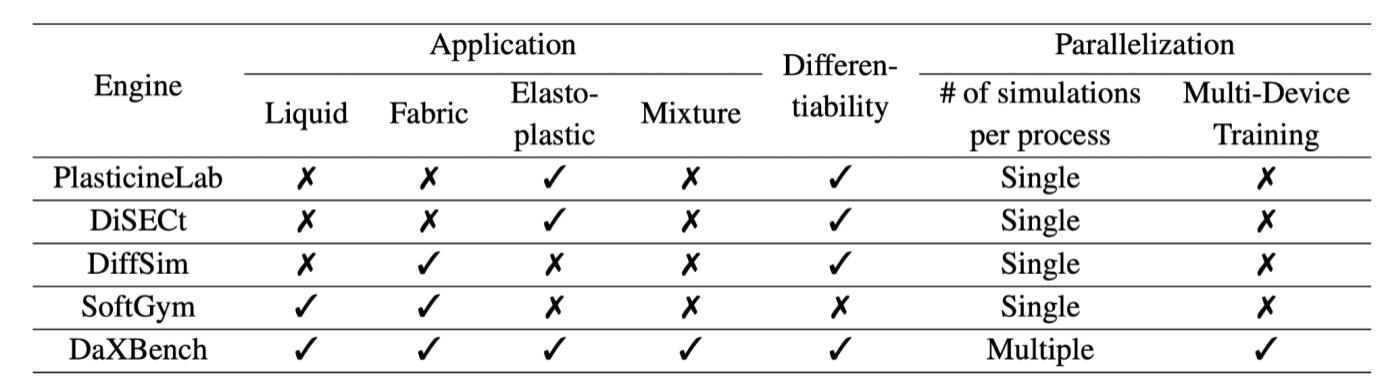
Comparison among the simulators for Deformable Object Manipulation.


We support all common types of deformable objects with their differentiable physics engine respectively.
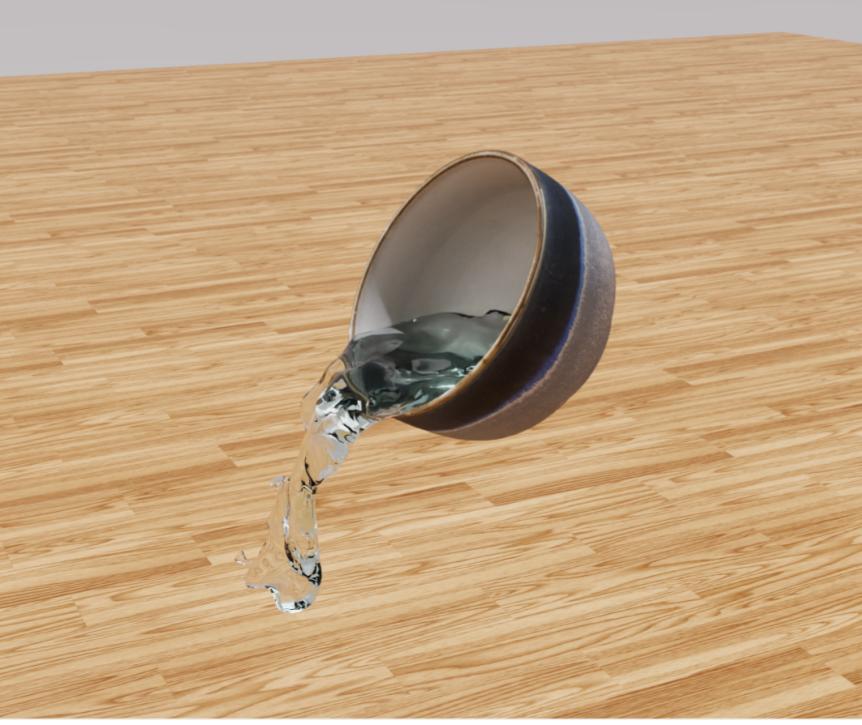
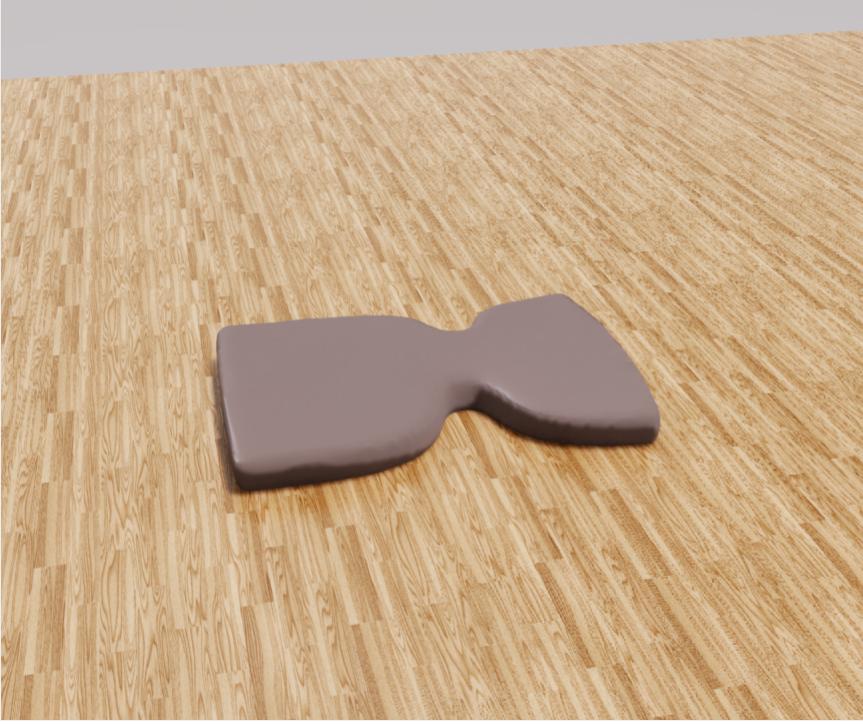
DaxBench supports a wide variety of deformable objects and implements the following representative DOM tasks in daily life.
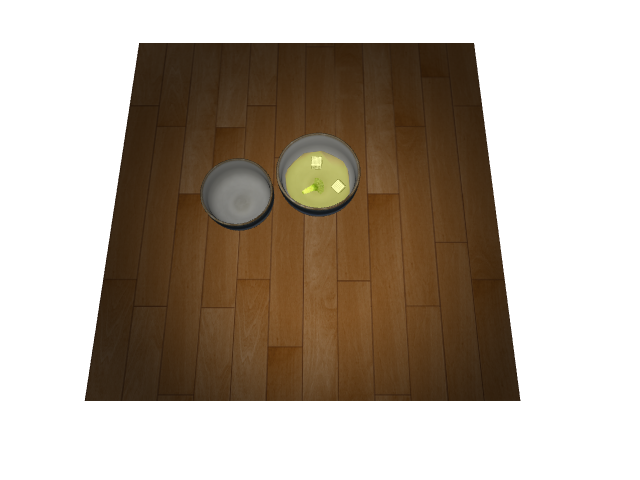
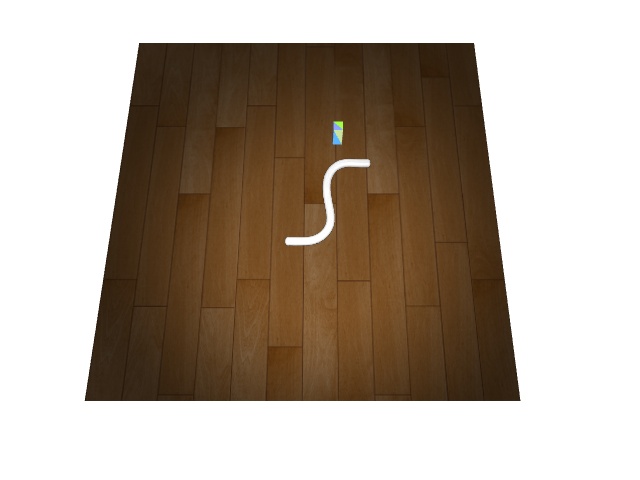
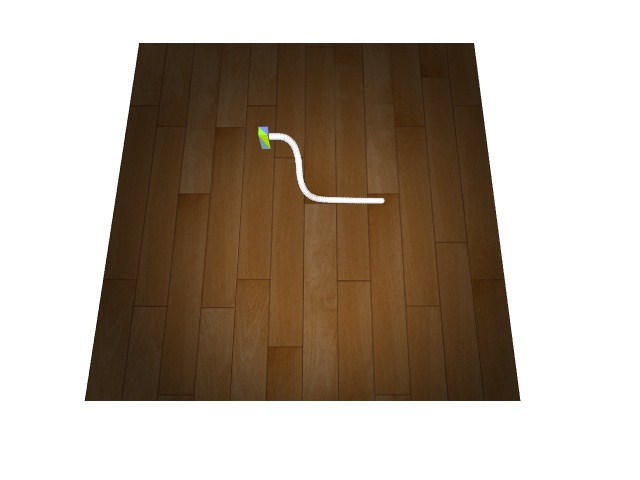


Each task is accompanied by its respective differentiable physics engine and a task-dependent reward function.

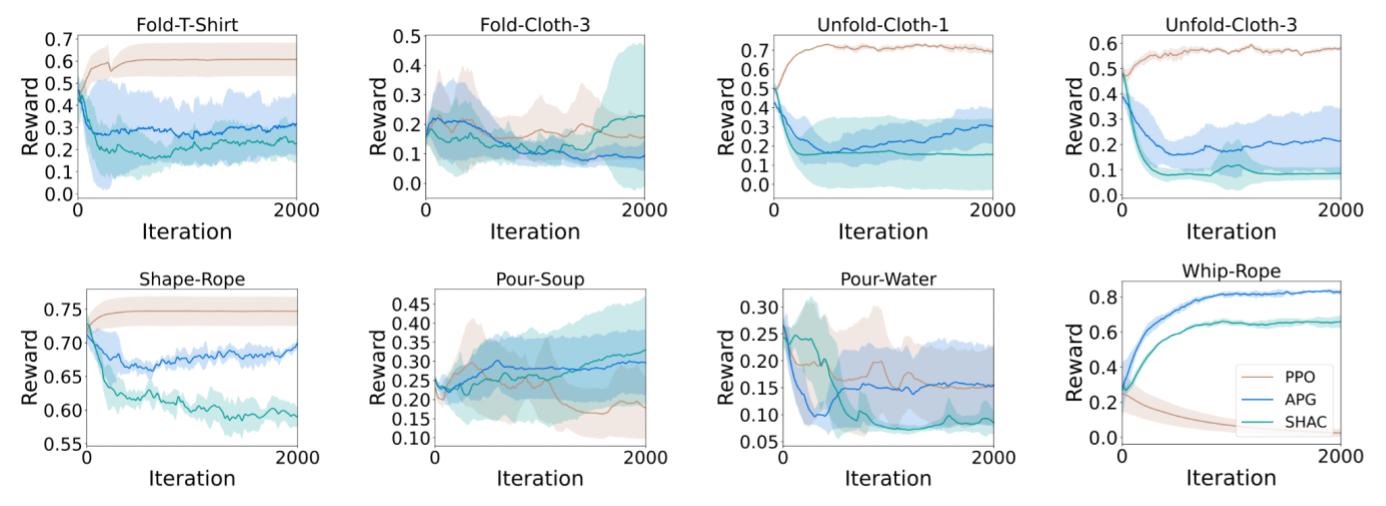
Learning curves of three benchmarked RL algorithms: PPO, APG, and SHAC. The y-axis shows the episode reward, scaled from 0 to 1, with larger values being closer to the goal state. The x-axis is the number of training iterations. All methods are trained in the same number of batched environments. We report the mean and variance of the performance for 5 seeds and each seed has 20 rollouts with different initializations.
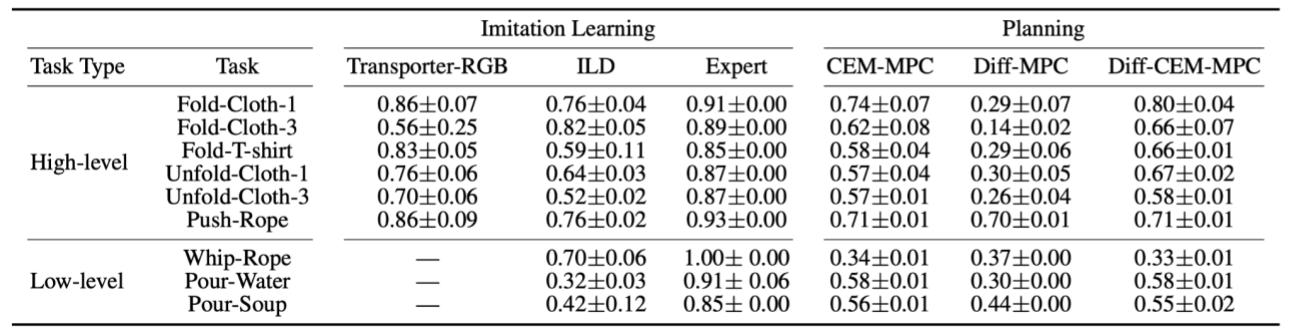
Task performance for the planning and imitation learning methods. We report the mean and standard error for the policy/control sequences evaluated under 20 seeds.
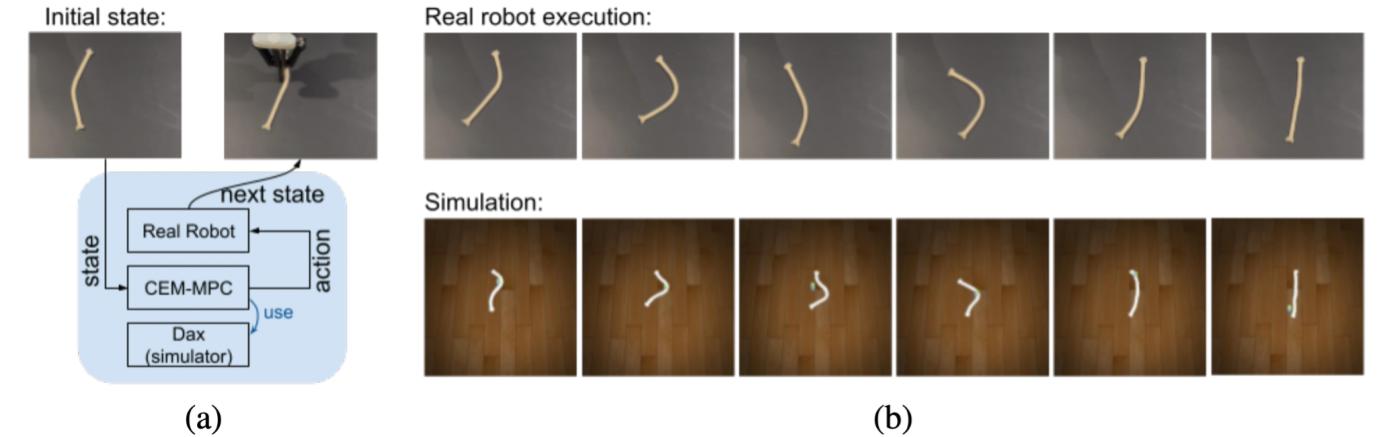
We deploy CEM-MPC in a Push-Rope task to straighten the rope in 6 steps on a real robot. (a) The system structure. CEM-MPC uses our DaX simulator as the predictive model. Given the current state estimated from a point cloud image, CEM-MPC plans the best action to be executed by the robot. (b) The states after each of the 6 pushes. We compare the dynamics in reality and in simulation. Top: state trajectory in a real robot experiment. Bottom: the next state predicted by DaX given the estimated current state and the corresponding planned action.
DaxBench performs System identification using the differentiable physics. Real robot experiment on Kinova-3 demonstrates small Sim2Real Gap.
We're excited to introduce DaXBench, a versatile differentiable simulation framework for deformable object manipulation tasks. As the first platform to simulate liquids, ropes, fabrics, and elastoplastics, DaXBench opens up new possibilities for research and comparison. With novel tasks like WhipRope and PourSoup, we're eager to see how this tool can enhance the development of DOM methods and shed light on the benefits of differentiable-physics-based methods.
Here are some handy links related to the project, provided for your convenience and seamless navigation. Enjoy exploring!
Let's explore and innovate together with DaXBench!
@inproceedings{chen2023daxbench,
title={DaXBench: Benchmarking Deformable Object Manipulation with Differentiable Physics},
author={Siwei Chen* and Yiqing Xu* and Cunjun Yu* and Linfeng Li and Xiao Ma and Zhongwen Xu and David Hsu},
year={2023},
booktitle={ICLR}
}